Taylor型レギュレータ リモートセンシング 熟考編 ― 2019年01月01日 22時40分53秒
とうとうこのテーマは年を越すことになった。
前回(12月18日)の記事では、リモートセンシング技術は確立されたかのような印象で終わったが、いつものとおり、その後迷走した。
最初は良いと思っていたのに、数日たったあたりから異変を感じるようになった。高い周波数域に緊張感があって、まったく楽しくない。これまでの経験から、これは発振している音だと直感。オシロスコープを取り出して、観測すると案の定であった。動作が安定していたと思い込んだ私の不覚である。
ということで、原点に戻って考え直すことにした。
そもそもリモートセンシングで大幅に理想状態に近づけるはずだというところから出発したのだが、まずはこれを疑ってみる。
そこで2種類のシミュレーションを比較する。
(1) まず最初は、レギュレータの直後に負荷があるケース。
その回路図がこれ。OSCの代わりにGaNを使った負荷装置をつなげてある。 負荷電源ピン(OUT)の波形は以下の通り。
負荷電源ピン(OUT)の波形は以下の通り。

(2) 次にレギュレータと負荷をおよそ40cmの同軸ケーブル(RG-316)で接続したケース。まず回路図から。 同じく、負荷電源ピン(OUT)の波形は以下の通り。
同じく、負荷電源ピン(OUT)の波形は以下の通り。
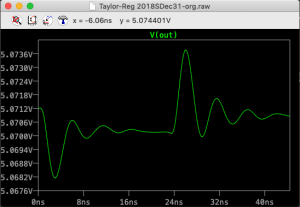 ご覧の通り、電圧の絶対値は若干異なるが、波形は酷似している。つまりリモートセンシングは意味がないという結論になってしまった。
ご覧の通り、電圧の絶対値は若干異なるが、波形は酷似している。つまりリモートセンシングは意味がないという結論になってしまった。
ここには載せなかったが、リモートセンシングしようとして制御素子を負荷側に持ってくると、かえって波形が乱れたり発振しやすくなるというデメリットが目立つようになる。
一体今まで何をやっていたのか。またまた「思い込み」「既成概念」で失敗してしまった。しかし遠回りしたおかげで、Taylor型レギュレータの振る舞いを理解できたのは収穫だった。
と言うことで、この項、次回へ続く。
前回(12月18日)の記事では、リモートセンシング技術は確立されたかのような印象で終わったが、いつものとおり、その後迷走した。
最初は良いと思っていたのに、数日たったあたりから異変を感じるようになった。高い周波数域に緊張感があって、まったく楽しくない。これまでの経験から、これは発振している音だと直感。オシロスコープを取り出して、観測すると案の定であった。動作が安定していたと思い込んだ私の不覚である。
ということで、原点に戻って考え直すことにした。
そもそもリモートセンシングで大幅に理想状態に近づけるはずだというところから出発したのだが、まずはこれを疑ってみる。
そこで2種類のシミュレーションを比較する。
(1) まず最初は、レギュレータの直後に負荷があるケース。
その回路図がこれ。OSCの代わりにGaNを使った負荷装置をつなげてある。


(2) 次にレギュレータと負荷をおよそ40cmの同軸ケーブル(RG-316)で接続したケース。まず回路図から。


ここには載せなかったが、リモートセンシングしようとして制御素子を負荷側に持ってくると、かえって波形が乱れたり発振しやすくなるというデメリットが目立つようになる。
一体今まで何をやっていたのか。またまた「思い込み」「既成概念」で失敗してしまった。しかし遠回りしたおかげで、Taylor型レギュレータの振る舞いを理解できたのは収穫だった。
と言うことで、この項、次回へ続く。
最近のコメント